Development of Active Lower Limb Robotic-Based Orthosis and
Frontiers A triple-step controller with linear active disturbance rejection control for a lower limb rehabilitation robot
Actuators, Free Full-Text

Sensors, Free Full-Text

Figure 1 from Active lower limb orthosis with one degree of freedom for people with paraplegia
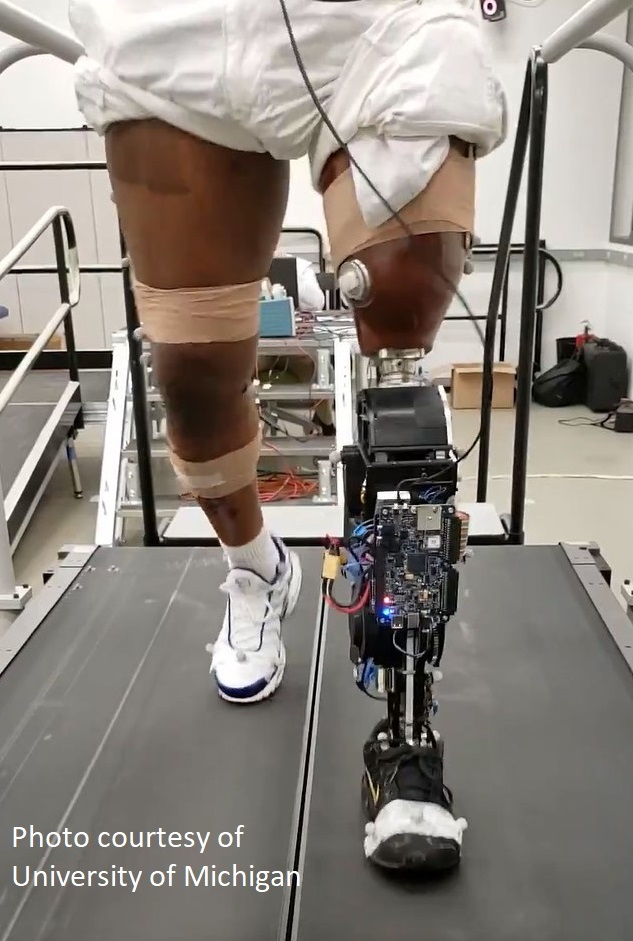
Current Research – Robert D. Gregg
Sensors, Free Full-Text
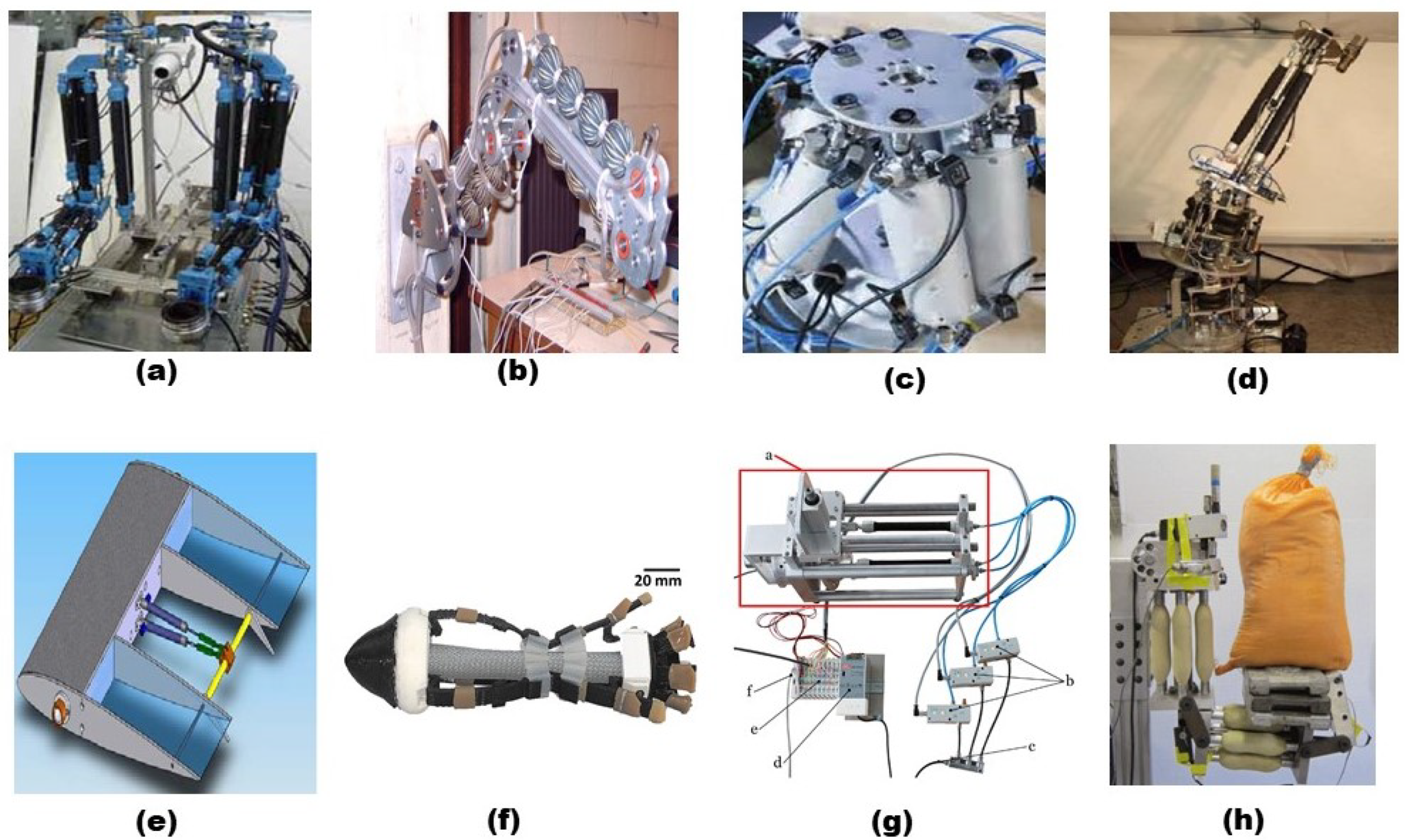
Stewart-platform-type ankle-foot assistive device

Development of Active Lower Limb Robotic-Based Orthosis and Exoskeleton Devices: A Systematic Review

A Numerical Method for Determining the Workspace of a Passive Orthosis Based on the RRRR Mechanism in the Lower Limb Rehabilitation System

Development of exoskeleton - The past and present

Development of externally powered lower limb orthosis with bilateral-servo actuator

Development and control of a new sitting-type lower limb rehabilitation robot - ScienceDirect

Development of a Robotic Lower-Limb Exoskeleton for Gait Rehabilitation: AGoRA Exoskeleton

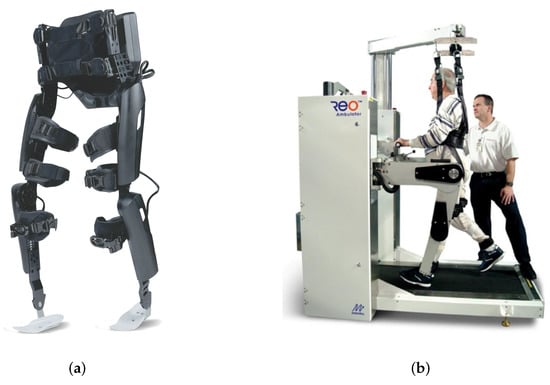
Rehabilitation Robots > Research > Intelligent Medical Robotics Laboratory
Applied Sciences, Free Full-Text