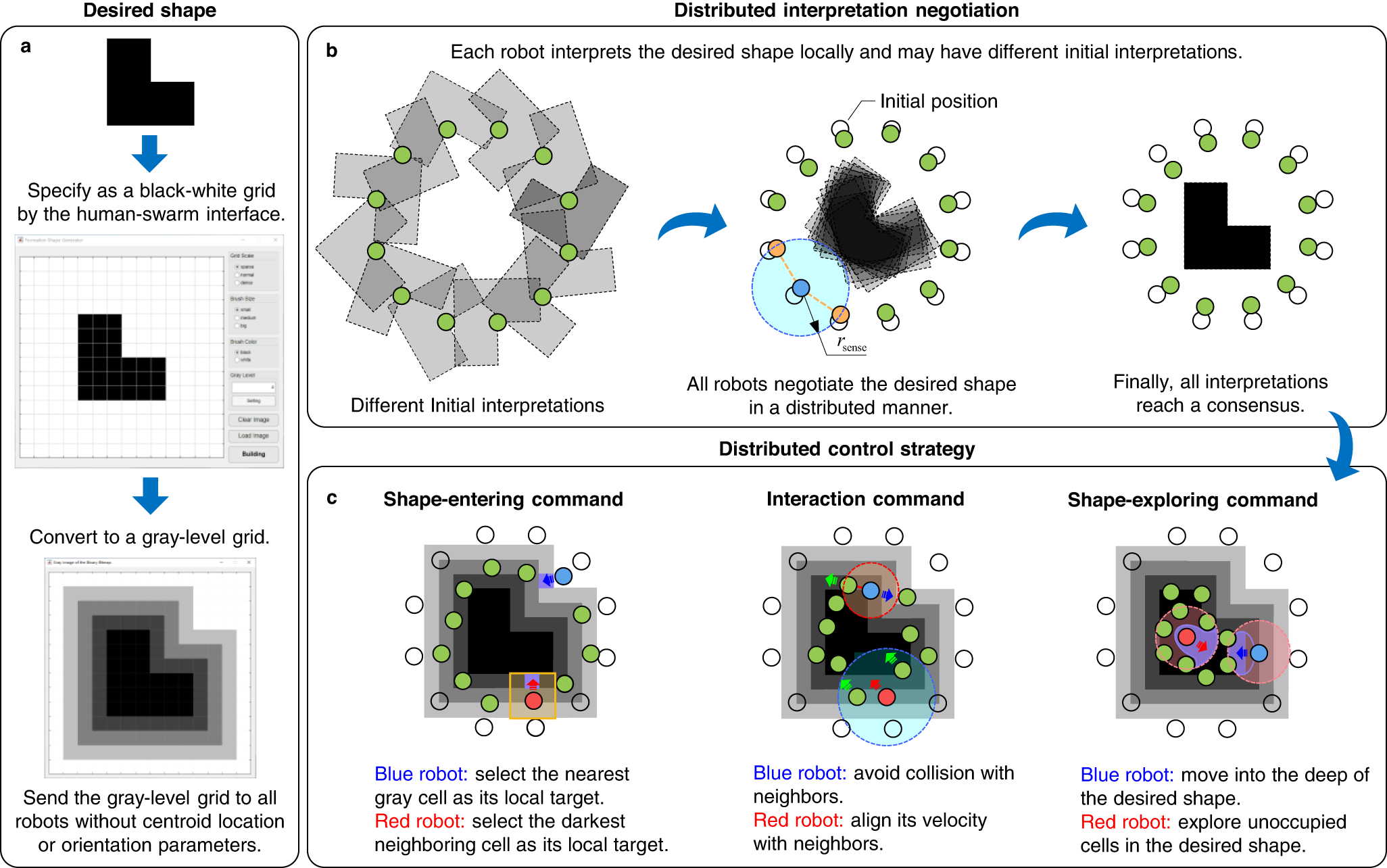
Mean-shift exploration in shape assembly of robot swarms
Description

Implicit function for a letter “P”. (a) Constraint points used to

Generating Goal Configurations for Scalable Shape Formation in Robotic Swarms

Nature Communications-2023] Mean-Shift Exploration in Shape Assembly of Robot Swarms

AI in Robotics: Exploring the Impact of Artificial Intelligence in Robotics - Awe Robotics

A parallel shape formation method for swarm robotics - ScienceDirect

Equivalence of the Fit-DNN using a single neuron with modulated delayed

Mean-shift exploration in shape assembly of robot swarms
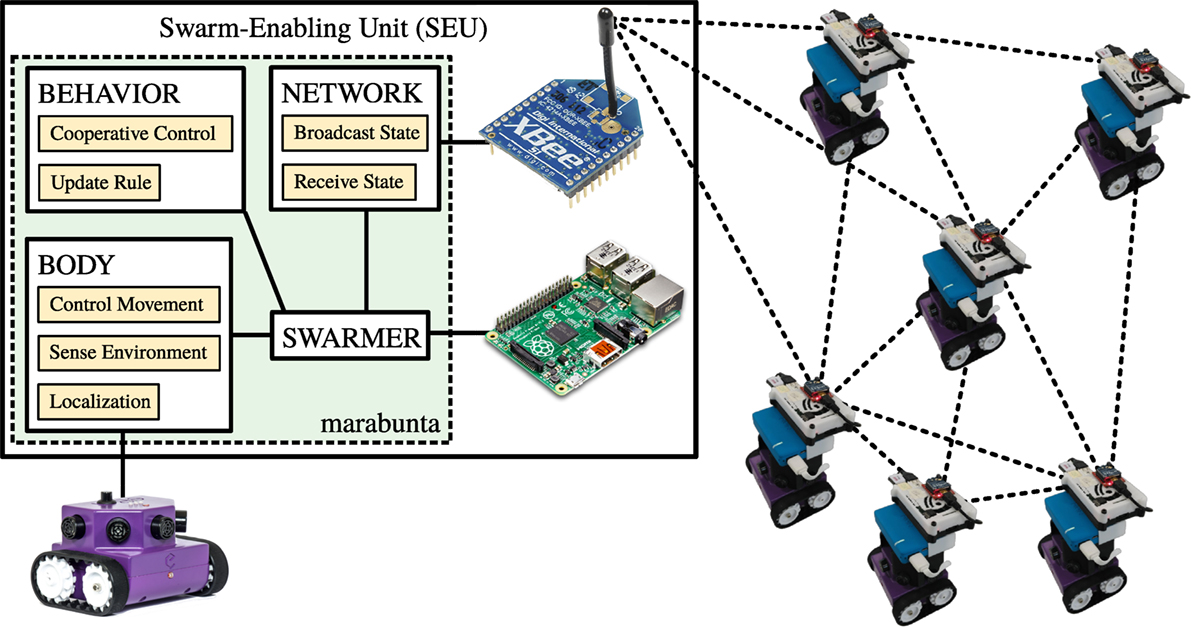
Frontiers Swarm-Enabling Technology for Multi-Robot Systems

Location Functions for Self-stabilizing Byzantine Tolerant Swarms
Related products








$ 13.00USD
Score 5(170)
In stock
Continue to book
$ 13.00USD
Score 5(170)
In stock
Continue to book
©2018-2024, belizeairportsauthority.com, Inc. or its affiliates