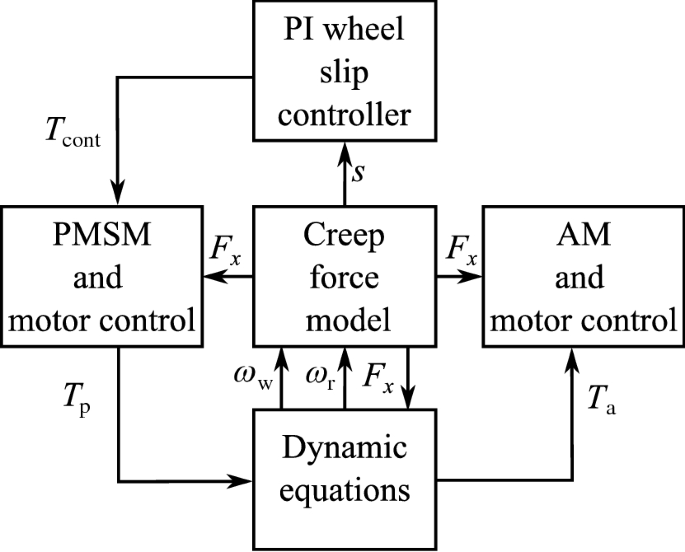
A novel anti-slip control approach for railway vehicles with traction based on adhesion estimation with swarm intelligence

Adhesion-Based Maximum-Seeking Brake Control for Railway Vehicles

Validation of an anti-slip control method based on the angular acceleration of a wheel on a roller rig
PDF) A novel anti-slip control approach for railway vehicles with traction based on adhesion estimation with swarm intelligence

Combined acceleration slip regulation for multi-wheel distributed electric drive vehicles considering torque loss factor - ScienceDirect

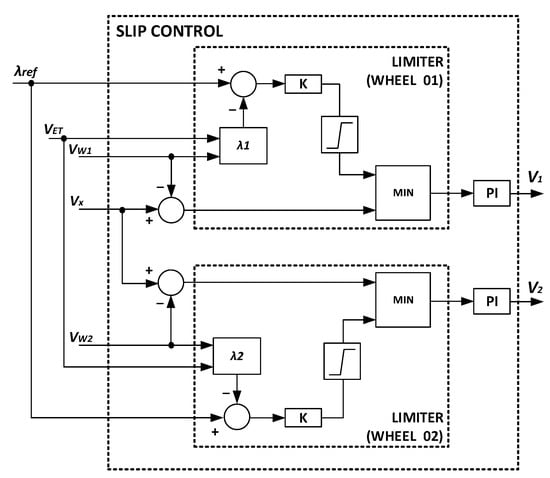
PDF] AUTOMATIC SLIP CONTROL FOR RAILWAY VEHICLES

A novel anti-slip control approach for railway vehicles with traction based on adhesion estimation with swarm intelligence

Typical shape of the general friction force and adhesion force in
Research on Optimal Adhesion Control of High-Speed Train Based on Extremum Seeking Algorithm

15: A schema of the tram wheel test stand

Kadir ZIREK, Doctor of Philosophy, University of Pardubice, Pardubice, Department of Transport Means and Diagnostics

高速列车滑模自抗扰黏着控制方法